Accu-pong
This one still gives me nightmares. And has got to be my least favourite project out of all of them. If you were to ask me what "accu-pong" is, I'd still be asking myself the same thing. I think a more fitting name is accu-beer-pong for the disabled. It doesn't matter though, the goal of this project was to transfer a ping-pong ball at least 6 feet into a red plastic solo cup. It was a team design project for one of my second year University classes. I still believe that the only reason this project exists is because the professor got tired of losing his game of beer pong everytime. Regardless of it's application, our team's design was simple: use an automated vehicle to transfer the ball directly to the solo cup. The only issue is I forgot to account for the fact that I was in a mechanical design course and not an computer systems course. Truth be told it was not the most optimal design. But it did work. For some time. Due to the constraints and limitations on materials, cardboard had to be used to construct the front tracks.
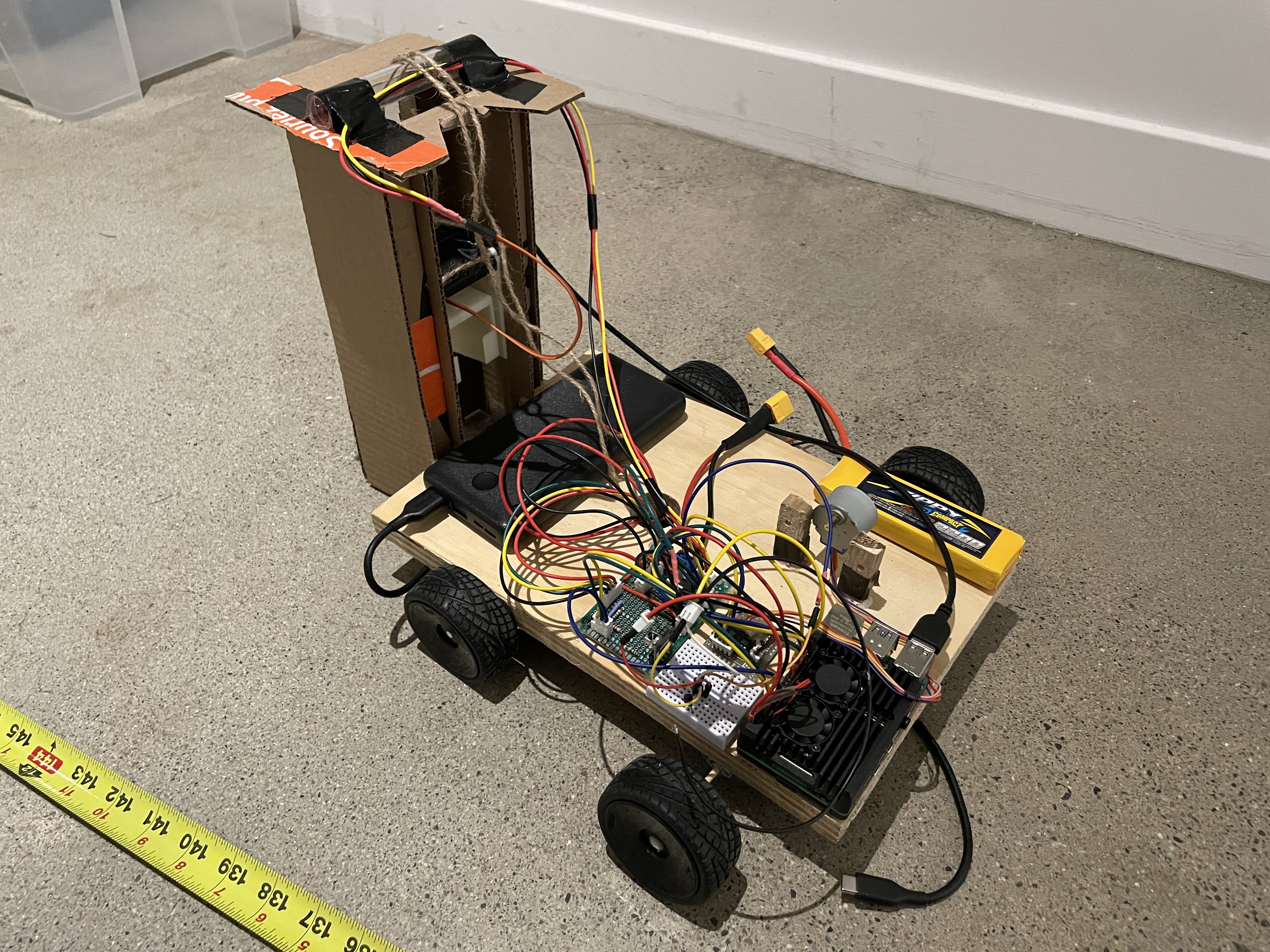
At the front of the car, there is a 3D printed cage which contains the ball with a small cutout on the bottom so that the ball contacts the floor at the start of the transfer - one of the requirements for the design. When the transfer begins, the car begins to accelerate forward and the pulley system raises the ball up to the height of the solo cup concurrently. The only issue is that this design is severely underpowered, wasting much time on accelerating and raising the pulley. The tolerances of the tracks are far too high to be practical as a result of the flimsiness of the cardboard. Other than that it still works. The Python script controlling the hardware is run on a Raspberry Pi, and everything is powered by a 7.4v 2s LiPo, and a 20000mAh USB charging bank to power the Raspberry Pi remotely. Initially, the design consisted of a camera mounted at the front to control the position of the car. However, I later realized that the car drove straight with no issues, so this feature was later omitted.